딥러닝과 주행로봇을 동시에 공부하거나 연구하시는 분
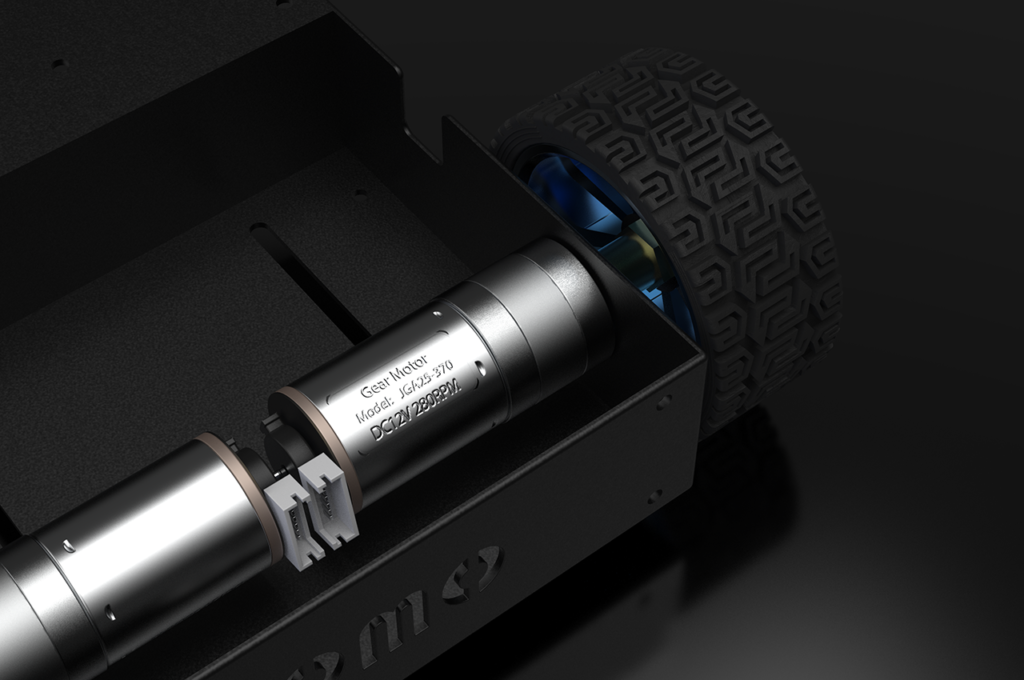
DC모터의 구동 방법과 주행로봇의 원리부터, SLAM과 영상처리까지 하나의 로봇으로 연구하고 싶으신 분
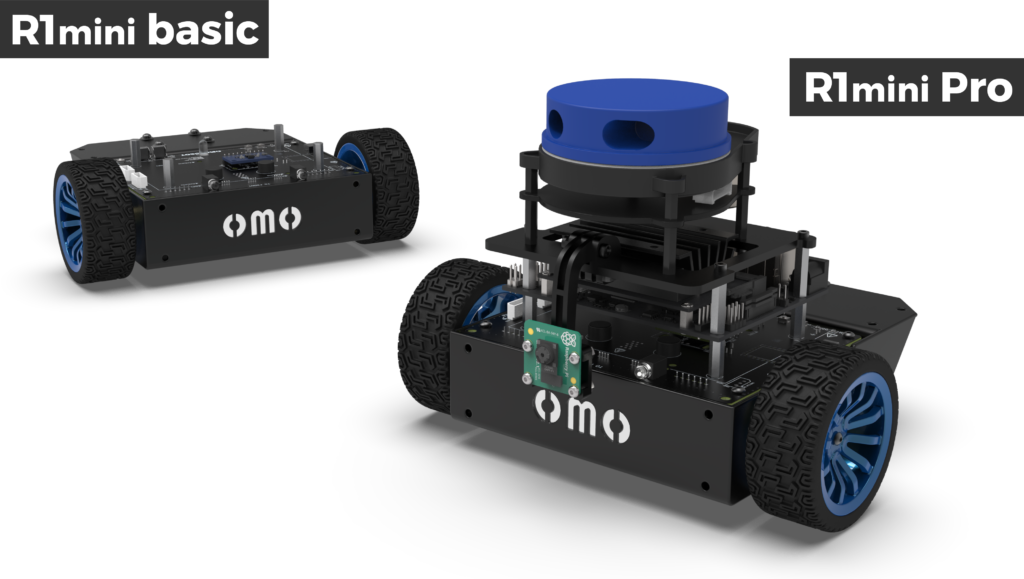
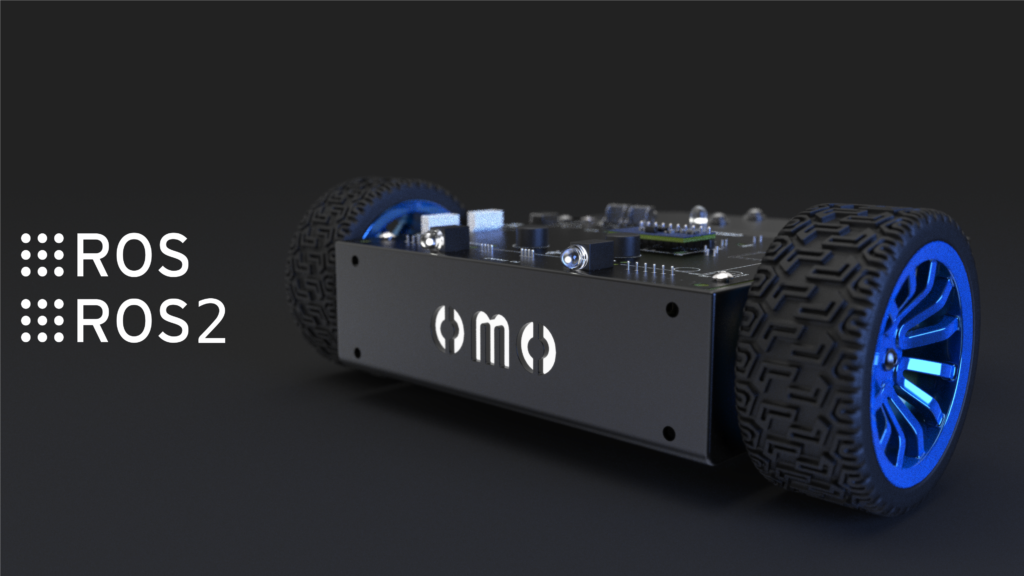
ROS1과 ROS2 패키지를 동시에 지원하는 로봇을 서로 비교하면서 공부하고 싶으신 분
마커인식, YOLO 구동, 마커 기반 SLAM, 라이다, 영상 기반 SLAM 등의 다양한 예제를 원하시는 분
정기적인 교육을 통해 개발진과 직접 소통하고 개발 방향에 참여하거나, 학습을 하고 싶으신 분
엄청난 분량의 ROS, 주행로봇 관련 수업 자료를 이용하고 싶으신 분
다음은 ROS melodic 환경에서 Google Cartographer를 사용하여 SLAM 매핑하는 과정입니다.