
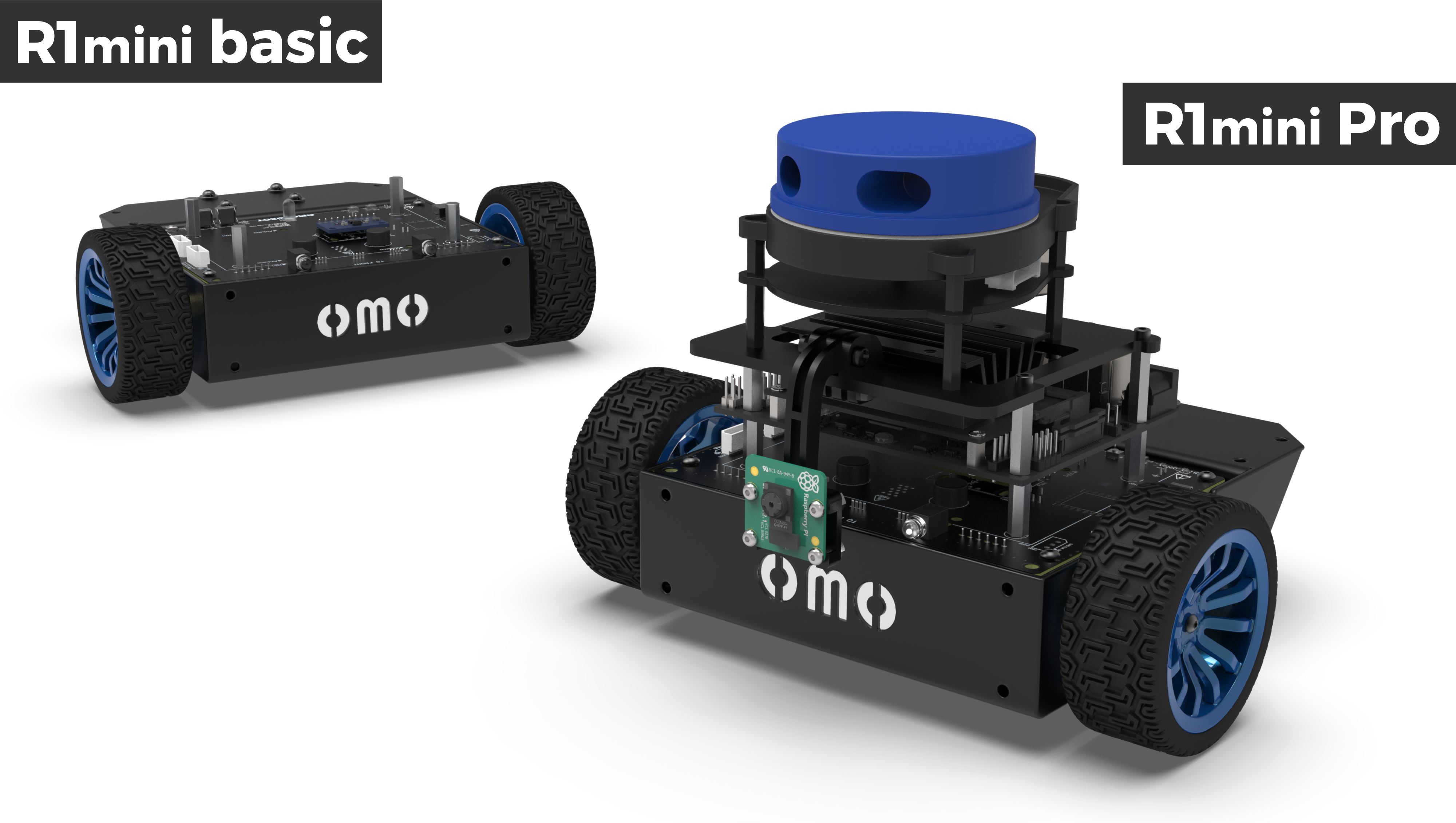
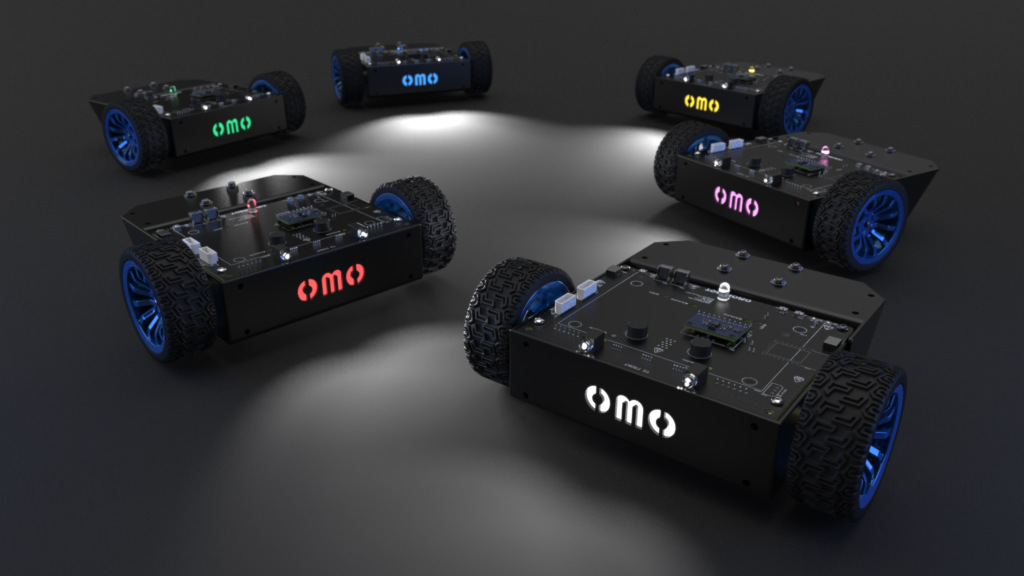
R1 mini
자율주행 교육/개발용 소형 모바일플랫폼
초급자부터 전문가까지 한 대의 로봇으로 지속하는 자율주행 연구
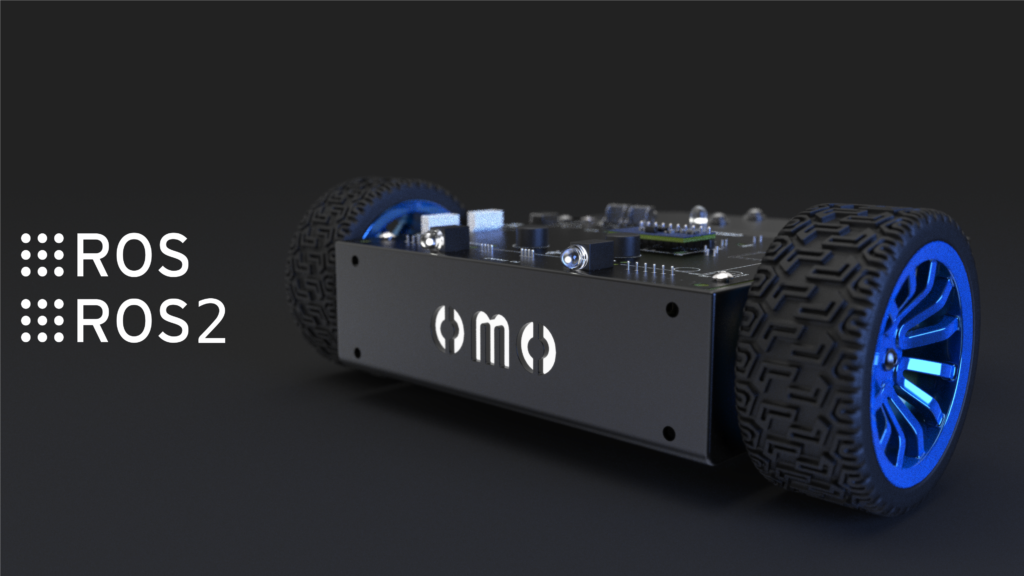
ROS를 지원하는 모바일 로봇
R1mini는 ROS와 ROS2를 지원합니다.

무료 온라인 ROS교육 제공
AI전문 개발자가 R1mini를 활용하여 강의하는
ROS온라인교육을 제공합니다
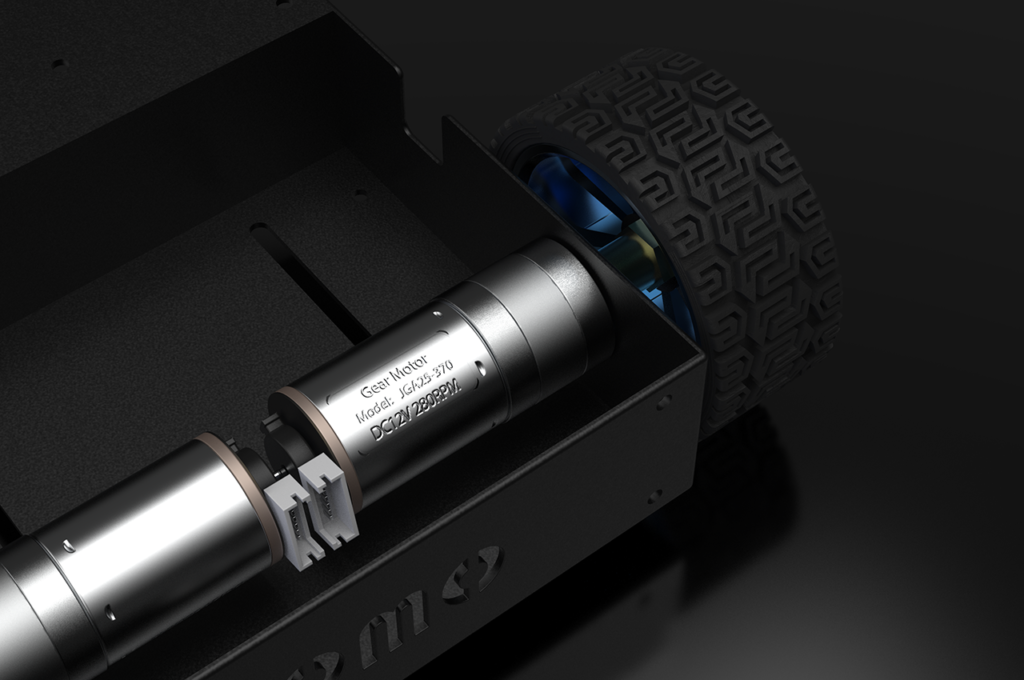
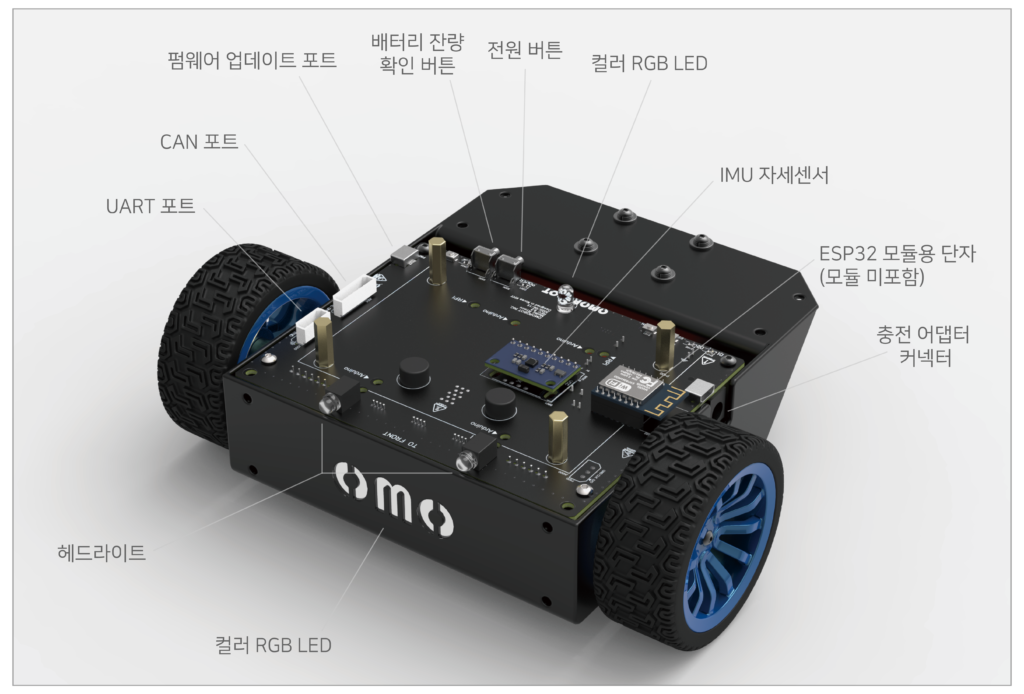
정밀 엔코더 모터 탑재
정밀 엔코더를 내장한 모터를 탑재하여
흔들림 없는 안정적인 주행이 가능합니다.
Lidar센서, 카메라 장착
360° 라이다와 카메라모듈을 장착할 수 있는
아크릴플레이트를 제공합니다.

IMU 센서, Wi-Fi 모듈 장착
ESP Wi-Fi 모듈을 장착할 수 있는 포트가 마련되어있습니다.
해당 모듈을 사용하면 아두이노에서도 쉽게 코딩하여
브라우저가 탑재된 PC나 스마트폰에서 원격 제어가 가능합니다.
OMOROBOT Github 페이지를 통해 예제프로그램이 제공될 예정입니다.
*ESP Wi-Fi 모듈은 기본 구성품에 포함되어 있지 않습니다.
RGB LED / 헤드라이트 탑재
시리얼포트를 통해 색상코드를 출력해보세요.
여러대가 모여있어도 내 로봇을 쉽게 찾을 수 있습니다.
또한 헤드라이트를 켜면 어두운 곳에서도 카메라로 사물을 식별할 수 있습니다.
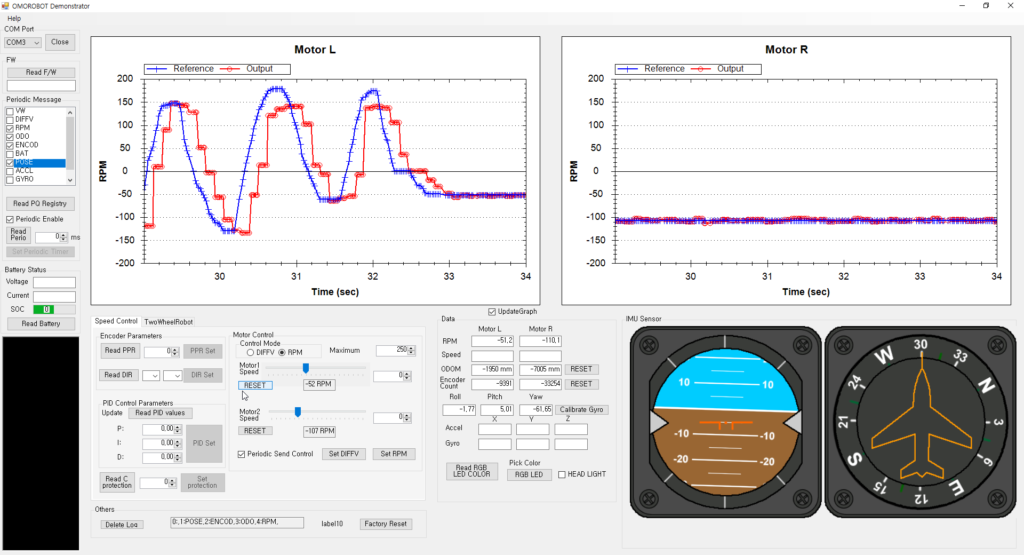
전용 튜닝프로그램 제공
모터의 응답특성에 따라 주행성능이 달라집니다.
전용 튜닝프로그램을 활용하여
로봇을 더 빠르거나 부드럽게 제어할 수 있습니다.
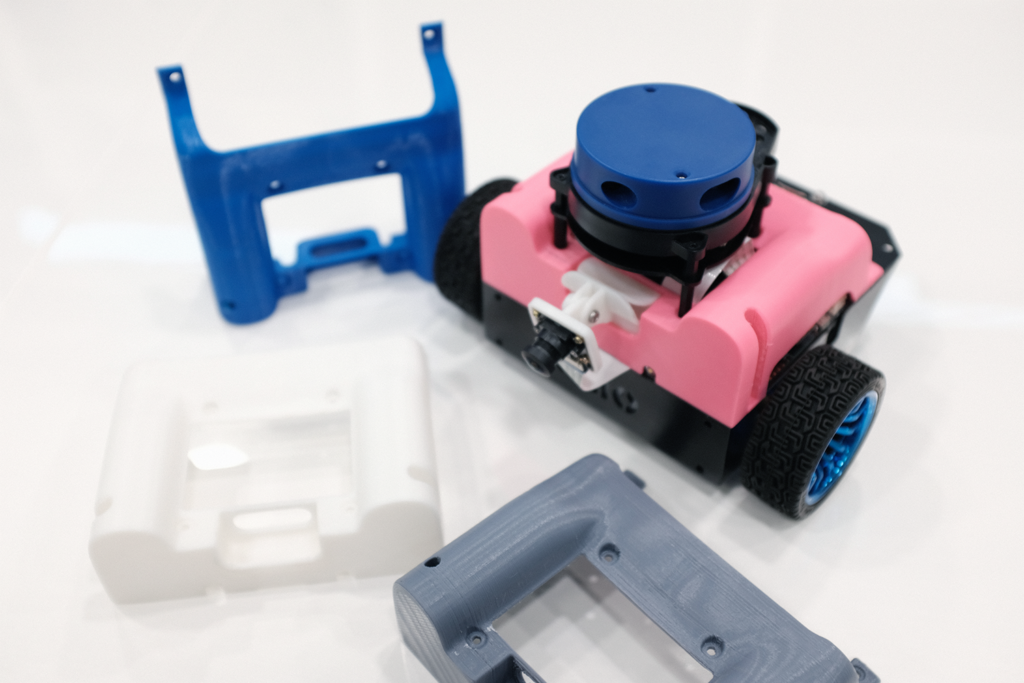
전용 3D 프린팅 케이스 3D data 제공
R1mini에 씌울 수 있는 멋진 케이스의 3D data를 제공합니다.
탈착 가능한 카메라모듈 마운트와 함께 R1mini를 꾸며보세요!


R1mini는 이런 분들에게 필요합니다.
딥러닝과 주행로봇을 동시에 공부하거나 연구하시는 분
DC모터의 구동 방법과 주행로봇의 원리부터, SLAM과 영상처리까지 하나의 로봇으로 연구하고 싶으신 분
ROS1과 ROS2 패키지를 동시에 지원하는 로봇을 서로 비교하면서 공부하고 싶으신 분
마커인식, YOLO 구동, 마커 기반 SLAM, 라이다, 영상 기반 SLAM 등의 다양한 예제를 원하시는 분
정기적인 교육을 통해 개발진과 직접 소통하고 개발 방향에 참여하거나, 학습을 하고 싶으신 분
엄청난 분량의 ROS, 주행로봇 관련 수업 자료를 이용하고 싶으신 분
만약 위 내용중 한 가지라도 해당되신다면 R1mini를 선택하세요!
다음은 ROS melodic 환경에서 Google Cartographer를 사용하여 SLAM 매핑하는 과정입니다.
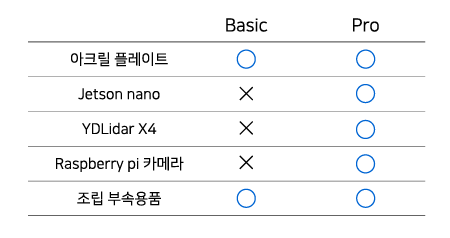
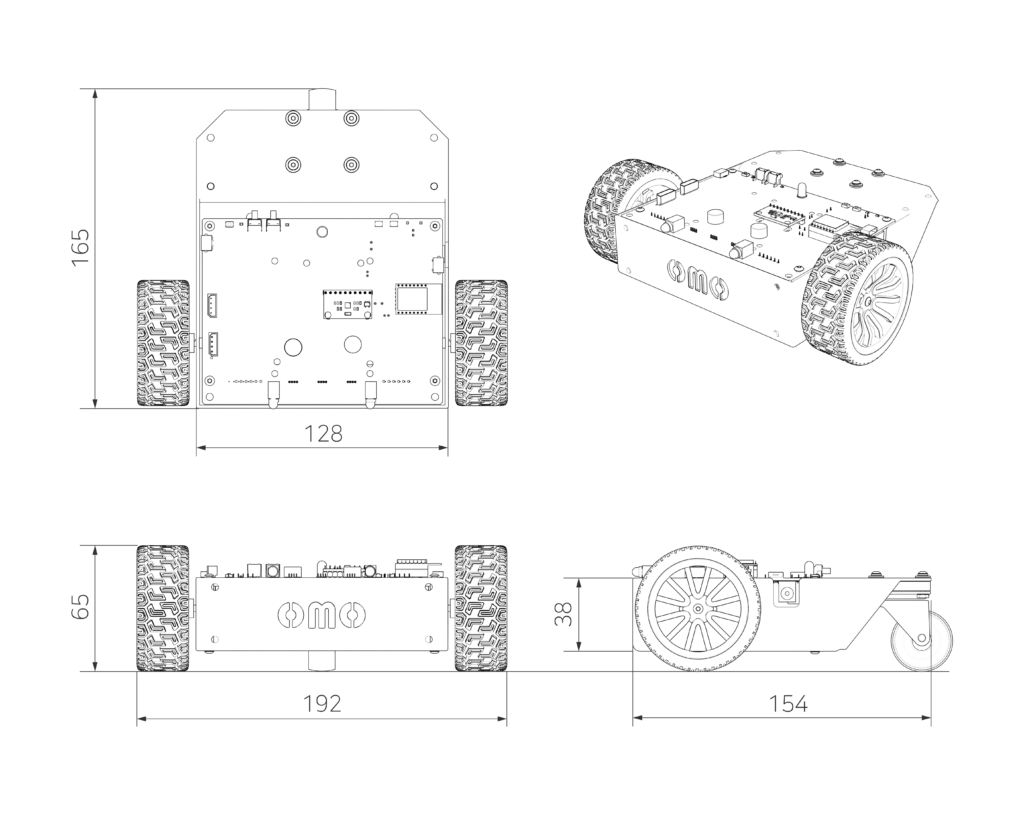
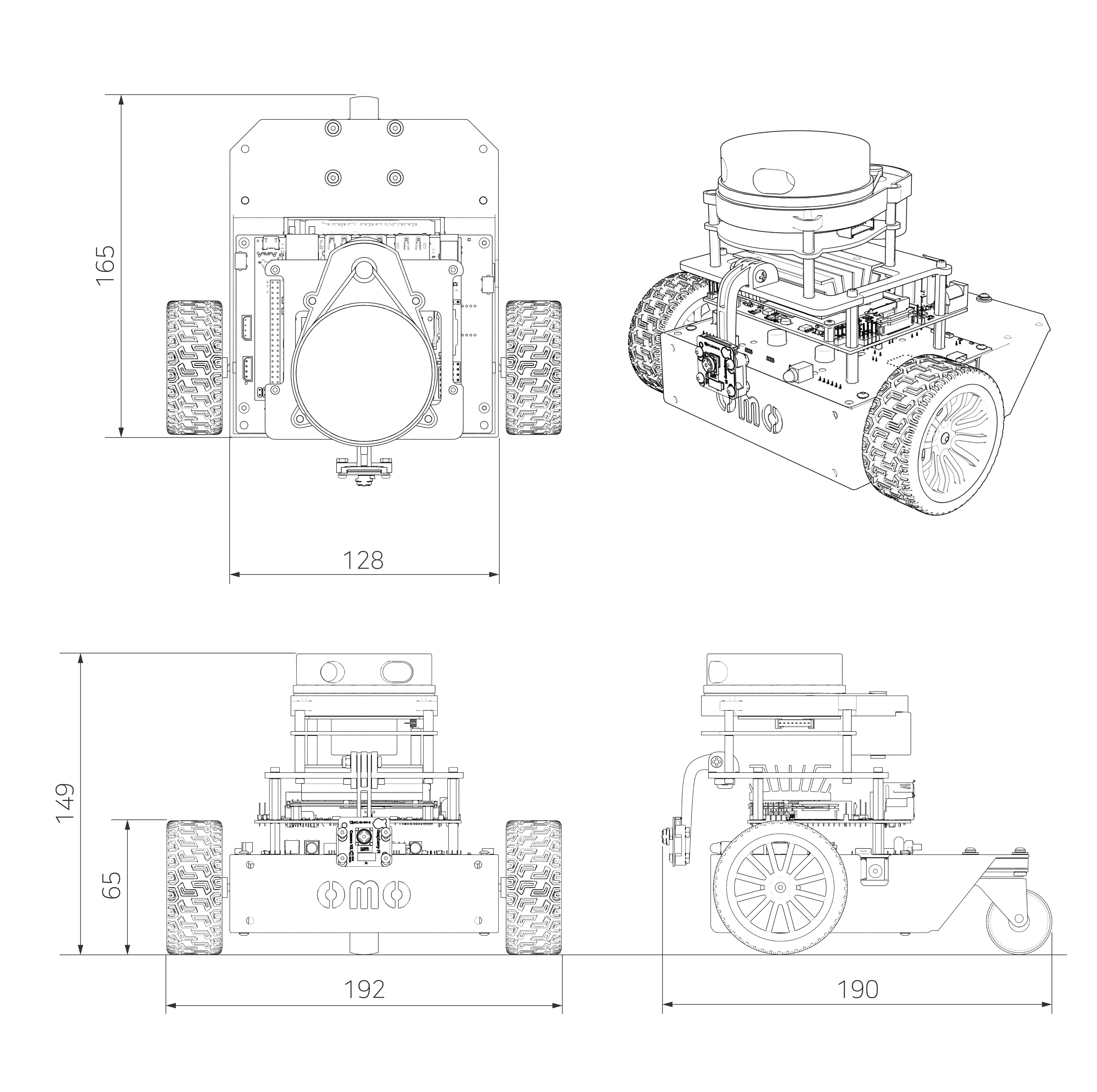
제품 사양
제품 크기 – R1mini Basic
제품 크기 – R1mini Pro
| 사이즈 | 193x165x67 (mm) | 무게 | 약 1050g(본체 기준, 배터리 포함) |
|---|---|---|---|
| 배터리 | 리튬이온 18650(3S1P 3.7V 2600mAh) | 메인 컨트롤러 | STM32F103 |
| 외부 입력 | 버튼 입력 | 외부 출력 | 모터, Color RGB LED, 부저, 헤드라이트 LED |
| 전원 입력 | 12V | 전원 출력 | 5V 3A |
| 센서 | 엔코더, 자세센서(IMU), 전류 측정 센서 | 유선 통신 인터페이스 | RS-232(TTL) 1115, 200bps(통신프로토콜 별도 제공) Can bus 500Kbps |
| 무선 통신 인터페이스 | ESP8266 Wi-Fi 통신모듈(아두이노 IDE) |
제품 지원
| R1mini E-manual | E-manual 페이지 이동 |
|---|---|
| R1mini ROS 패키지 | Github omo_r1mini |
| R1mini 3D printing case data | 3D web viewer 이동 |
| R1mini 3D printing data(*.stl) | Download page |