
R1
주행용 오픈 모바일 플랫폼
충분한 적재 중량과 전원, 기계적 확장성


ROS를 지원하는 모바일 로봇
R1은 ROS(Robot Operating System)를 지원합니다.
R1 활용 사례 – 방역로봇
구현하고자 하는 서비스가 있다면 R1에 탑재하고, 지령을 내려
로봇이 전송하는 주변 환경 정보를 수집할 수 있습니다.
SLAM과 인공지능, 영상인식등을 사용할 수 있도록
패키지를 제공합니다.
R1은 이런 분들에게 좋은 선택지입니다.
여러분의 아이디어를 구현할 충분한 적재 중량과 전원, 기계적 확장성을 필요로하시는 분
ROS패키지를 통해 ROS 환경에서 작업을 하길 원하시는 분
자율주행, SLAM 등의 분야를 이용해서 아이디어를 구현하고 싶으신 분
OMOROBOT R1은 ROS를 지원합니다.
제품 사양
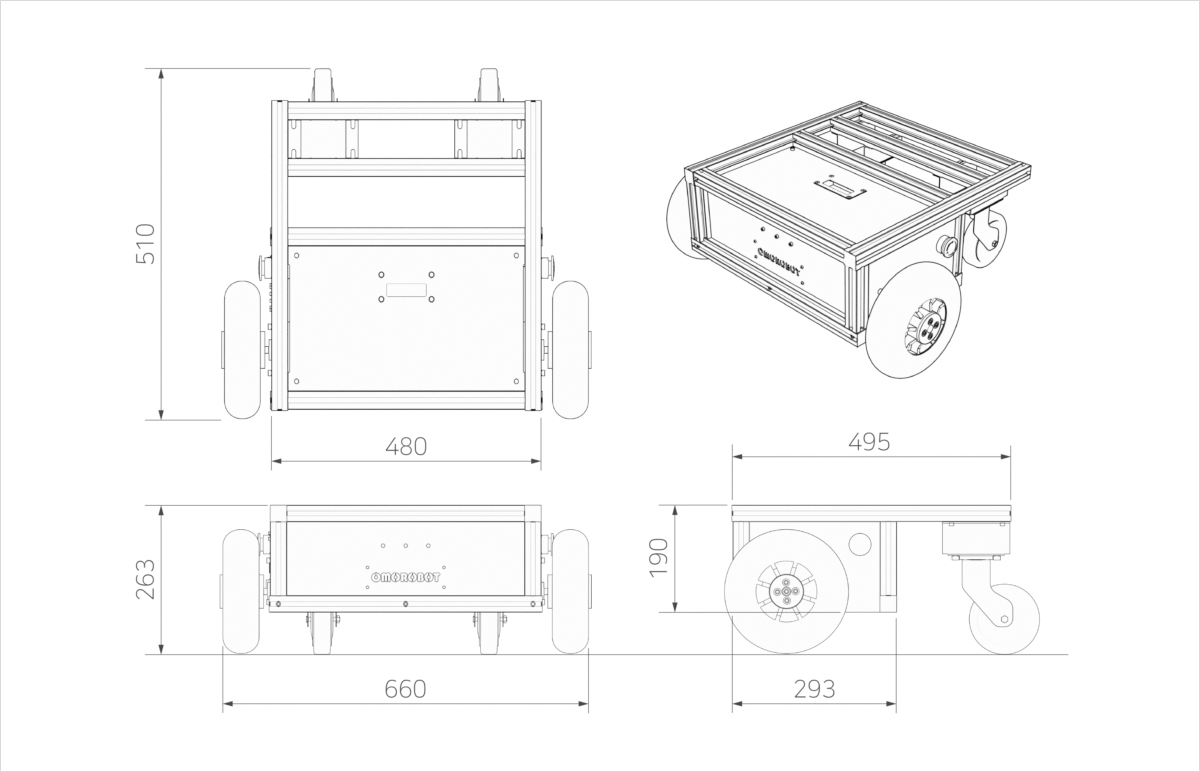
| 사이즈 | 660x510x263 (mm) | 무게 | 37kg (배터리 포함) |
|---|---|---|---|
| 배터리 | 24V 12Ah (12V 12Ah x2) | 속도 | 최고 1.2m/s |
| 적재 중량 | 100kg | 등판력 | 100kg 적재 시 등판률 13% |
| 모터 | 120W DC 기어드모터 | 운용시간 | 8시간 (환경에 따라 다름) |
| 충전시간 | 4시간 | 바퀴 사양 | 8 inch |
| 외부포트 | CAN / RS-232 / S-BUS / 외부전원 24V |
제품 지원
| R1 Program & firmware | Protocol test program v1.0 |
|---|---|
| R1 ROS 패키지 | R1 Github 페이지로 이동 |
| R1 Manual v1.41 | RS-232/UART Protocol Product manual |