.png)
R1
An Open Mobile Robot Platform designed for autonomous driving
with sufficient load weight, power, and mechanical expandability.


Development Platform with ROS Support
R1 supports ROS (Robot Operation System).
R1 User Case – Disinfection Robot
Use R1 to implement any type of service,
give instructions and collect surrounding environment data transmitted by the robot.
Besides, we can provide you with a package solution that may include simultaneous localization
and mapping (SLAM), artificial intelligence, image recognition, etc. based on your requests.
R1 Is Fit For Those Who
are looking for a sufficient load weight, power, and mechanical expandability robot to implement ideas;
want to use the ROS package to implement ideas;
would like to use autonomous driving, SLAM, and other ways to implement ideas.
Product Specification
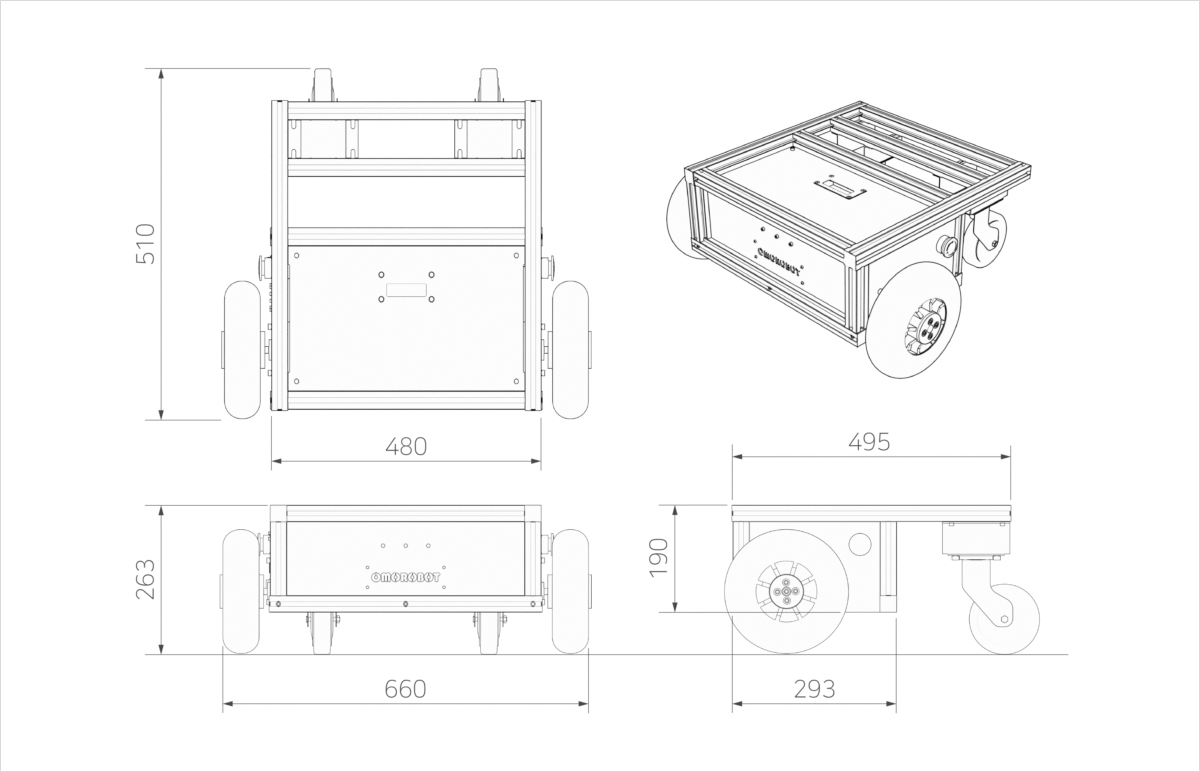
| Size | 660x510x263 (mm) | Weight | 37kg (includes battery) |
|---|---|---|---|
| Battery | 24V 12Ah (12V 12Ah x2) | Max. Speed | 1.2m/s |
| Max. Load | 100kg | Climbing Ability | 10˚ slope (with 100kg loads) |
| Motor | 120W DC Geared Motor | Charging Time | Up to 8 hours (depends on operation environments) |
| Charging Time | Up to 4 hours | Wheel Size | 8 inch |
| External Ports | CAN / RS-232 / S-BUS / External power charger 24V |
Documents Support
| R1 Program & firmware | Protocol test program v1.0 |
|---|---|
| R1 ROS지원 – OMOROS | Visit OMOROS Page |
| R1 Manual v1.41 | RS-232/UART Protocol Product manual |